
![]() Current Researchers Profile
Current Researchers Profile
 |
Geoff Slipher Phone: 757.325.6831 | Email Researcher |
Geoff joined Morpheus Lab in the spring of 2005 immediately after receiving his BS in aerospace engineering from the University of Maryland. As an undergraduate, Geoff designed, machined, and successfully tested a unique swashplate design for the micro-coaxial rotorcraft (MICOR) project while working for the Gessow Rotorcraft Center. He also worked as an engineering intern for Systems Planning & Analysis (SPA) in the Advanced Engineering Development Group, where he manufactured, calibrated, and tested fiber-optic based sensors (using Bragg gratings) for evaluation by the Office of Naval Research. While with SPA, Geoff also worked on a damage detection algorithm project for the Joint Strike Fighter as well as a real-time dynamic beam shape detection algorithm using distributed fiber optic sensors. Geoff was also involved in getting the University of Maryland chapter of Engineers Without Borders (EWB) started during his senior undergraduate year, serving as the project chair in 2004.
At Morpheus Lab, Geoff performs his research in the field of applied smart materials. He works with dielectric elastomers (a type of electroactive polymer), studying novel uses of these materials as actuators. His dissertation topic involves developing a novel synthetic jet actuator that employs dielectric elastomers.
Graduate Research
Title: Electroactive Polymer Synthetic Jet Actuators ("EJETs") for Low Speed Active Flow Control
 The multidisciplinary field of active flow control holds the near-term promise of significantly increasing the aerodynamic efficiency of vehicles, thereby directly reducing the operating costs and environmental impacts of vehicles without needing to modify or compromise vehicle design. One means of achieving active flow control utilizes synthetic jets (SJs), which work by injecting energy into fluid flow fields through the cyclic transfer of fluid momentum. The objective of this ongoing research is to develop and characterize a SJ actuation method, utilizing electroactive polymers, that meets four critical requirements for implementation: 1) that it is inexpensive, 2) that it is lightweight, 3) that it is mechanically simple, and 4) that it operates efficiently in low speed regimes.
The multidisciplinary field of active flow control holds the near-term promise of significantly increasing the aerodynamic efficiency of vehicles, thereby directly reducing the operating costs and environmental impacts of vehicles without needing to modify or compromise vehicle design. One means of achieving active flow control utilizes synthetic jets (SJs), which work by injecting energy into fluid flow fields through the cyclic transfer of fluid momentum. The objective of this ongoing research is to develop and characterize a SJ actuation method, utilizing electroactive polymers, that meets four critical requirements for implementation: 1) that it is inexpensive, 2) that it is lightweight, 3) that it is mechanically simple, and 4) that it operates efficiently in low speed regimes.
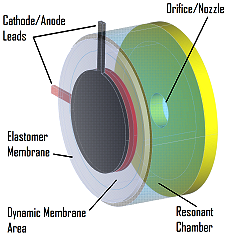
The actuation method utilizes a pre-strained dielectric elastomer membrane excited to operate at resonance by the periodic application of Maxwell stress introduced through compliant electrodes. Experimental results to date have demonstrated greater than +/-25 m/s cyclic velocity at the synthetic jet exit with an actuation frequency of approximately 200 Hertz, a maximum power consumption of 0.5 Watts RMS per actuator, a mass less than 10 grams, and a nozzle area of 1.6 square centimeters.
Professional Objectives
As his career progresses, Geoff hopes to apply his multidisciplinary knowledge in structural dynamics, smart materials, and controls engineering to help solve some of the significant, challenging, and exciting engineering problems we face as a nation. It is Geoff’s dearest wish to serve his country with honor and distinction.
Personal Statement
"I was not considering graduate school until a chance encounter with Dr. Hubbard. That short 30 minutes changed my life and I have enjoyed collaborating with him and the other researchers in Morpheus Lab ever since. I am forever grateful for the trust he places in us as his students, and for the amazing learning opportunity and collaborative environment he has created."
![]()
Home | Director | Researchers | Alumni | Visitors | Contact